ROV DIY:手頃な価格で遠隔操作水中ビークルを構築する
水中探査は、かつては予算の多い科学者や専門家に限定されていましたが、技術の進歩によりアクセス可能になりつつあります。遠隔操作水中ビークル(ROV)を低コストで構築することで、深海の扉が愛好家にも開かれています。Mediumの記事によると、連邦政府の海洋探査予算(推定2,000万~3,000万ドル)のかなりの部分が深海探査のツールや船舶に充てられており、DIYイニシアチブがこの探査を民主化する可能性を示しています。
テクノロジー愛好家やDIY愛好家にとって、自分自身のROVを構築することは、莫大な投資をせずに未知の世界を発見するユニークな機会です。この詳細なガイドは、検証済みの情報源とコミュニティからの経験に基づいて、各ステップを案内します。技術的課題、経済的解決策、そしてオープンソースプロジェクトを活用して水中探査を成功させる方法について説明します。
> 重要な洞察:DIY ROVの構築は単なる技術プロジェクトではありません。それは市民海洋学への入り口であり、誰もが海洋生態系の知識に貢献できるようにします。

水中探査中のDIY ROVの動作 - DIYプロジェクトの実現可能性を示す
なぜDIY水中ROVを構築するのか?
遠隔操作水中ビークルは、人間の潜水に関連するリスクやコストなしに水中環境を探査できます。難破船の調査、海洋生物の研究、個人的な好奇心の充足など、これらの機器は比類のない柔軟性を提供します。IEEE Spectrumは、独自のROVを所有することで濡れることなく海底を発見できると指摘し、アマチュアや教育関係者の可能性を広げています。
DIY ROVの主な利点:
- 財政的アクセシビリティ:商業ソリューションに比べてコスト削減
- 完全なカスタマイズ:特定のニーズへの適応
- 技術的学習:電子工学と機械工学のスキル開発
- 活発なコミュニティ:知識共有と技術サポート
しかし、商業用ROVは数千ユーロかかる場合があり、多くの人にとって手が届きません。DIYアプローチはゲームチェンジャーです:標準コンポーネントとオープンソースデザインを使用することで、コストを大幅に削減できます。ArduPilotの議論で言及されているOpenROVプロジェクトは、例えば独自のROVを構築するためのキットを提供し、活発な知識共有コミュニティを促進しています。
主要な技術的課題と実用的な解決策
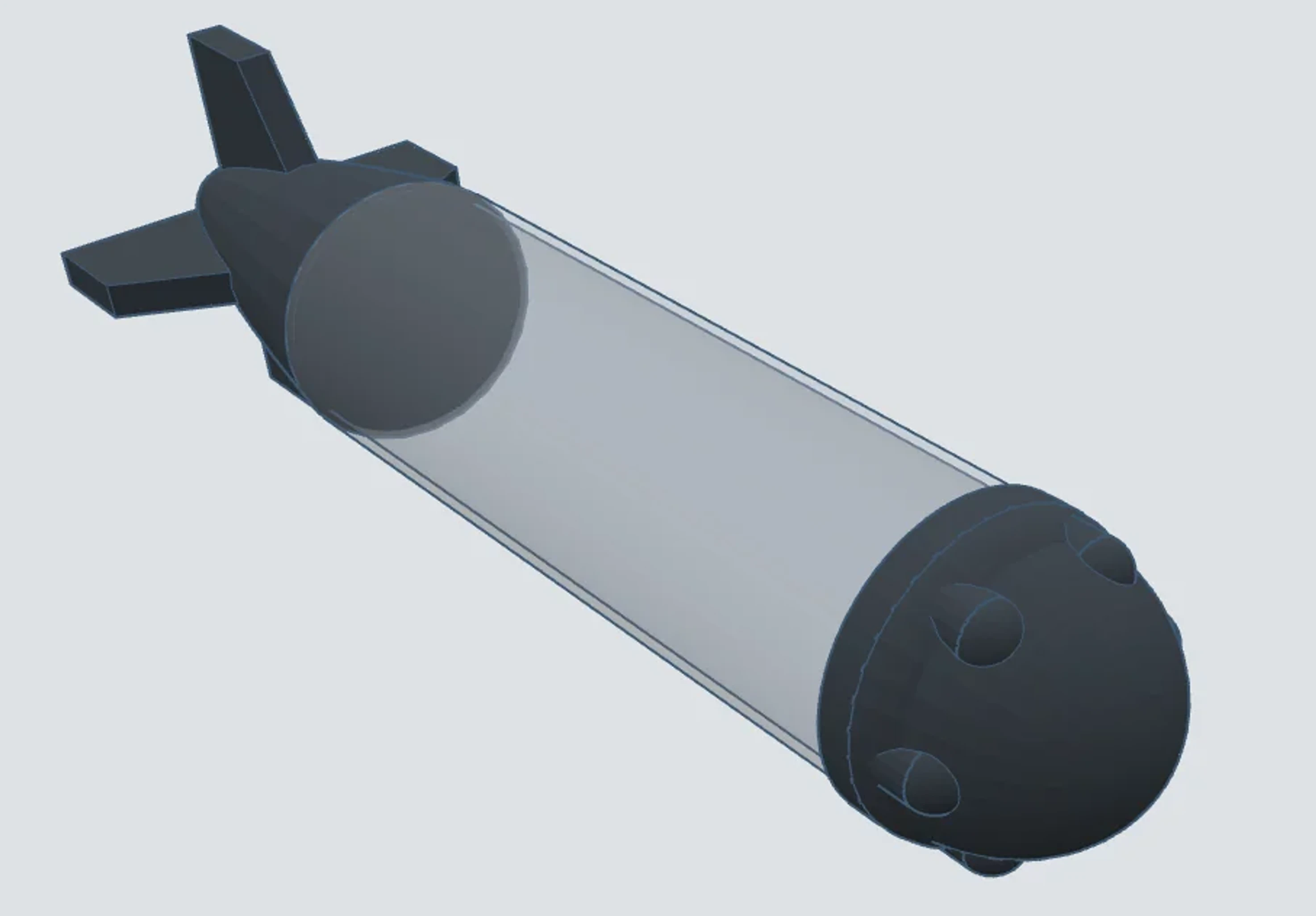
防水性と耐圧性
防水性はDIY ROVの構築における主要な課題です。電子部品は圧力と湿気に耐える必要があります。Blue Roboticsフォーラムでは、ユーザーが3DプリントされたROVでの経験を共有し、材料の選択と厳格なテストの重要性を強調しています。
防水性の実用的な解決策:
- IP68認定の防水ケースを使用する
- 耐水性のある特別なケーブルを優先する
- 深い潜水前に浅い水域でテストを実施する
- すべてのインターフェースにマリンシリコーンシーリングを適用する
水中推進システム
航空ドローンで一般的に使用されるブラシレスモーターは適応可能ですが、耐水性のコントローラーが必要です。Blue Roboticsの参加者は、安価なソリッドステートリレー(SSR)を焼損した後、より信頼性の高いユニットを選択したと報告しています。
推進の推奨構成:
- 防水ケース付きブラシレスモーター
- 防水ESCコントローラー
- 水中推進用に最適化されたプロペラ
遠隔制御と伝送
テザーケーブルを介した信号伝送はROVの動作に不可欠です。ケーブルの品質は接続の信頼性に直接影響します。
伝送の重要なポイント:
- 十分な長さのテザーケーブルを選択する(最低50m)
- 引っ掛け防止保護付きの頑丈なケーブルを選ぶ
- 防水コネクターの互換性を確認する
これらの技術的課題は克服不可能ではありません。綿密な計画とコミュニティリソースへのアクセスにより、初心者でも進歩できます。Blue Roboticsに文書化された「ジュール・ヴェルヌ」プロジェクトは、ロシアのDIY愛好家がカスタムCNCマシンと改造された中国製旋盤を使用して精密部品を製造した方法を示し、適切な工具の重要性を実証しています。
あなたのDIY ROVの経済的アプローチ
材料と製造
Blue Roboticsのユーザーが説明するように、3Dプリンターの使用により、手頃な価格でカスタムハルとサポートを作成できます。
DIY ROVの材料選択:
- PLAまたはABS:3Dプリント用(強度と価格のバランスが良い)
- ポリカーボネート:より良い耐久性が必要な重要な部品用
- グラスファイバー:強度向上が必要なハル用
電子機器と制御
一般的な電子部品を統合して、飛行ロジックと通信を管理できます。
推奨電子構成:
- 処理用のArduinoまたはRaspberry Piコントローラー
- 故障を防ぐための高品質ソリッドステートリレー(SSR)
- モニタリング用の圧力および温度センサー
- 統合LED照明付き水中カメラ
ソフトウェアとプログラミング
ArduPilotなどのプラットフォームは、ROV制御用のオープンソースファームウェアを提供し、プログラミングと調整を容易にします。
ROVプロジェクトのソフトウェアオプション:
- 高度な制御用のArduSubファームウェア
- カスタマイズ可能な操縦インターフェース
- パフォーマンス分析用のデータログ
CPS Droneは、水中ドローンの構築は航空ドローンの原理に似ているが、水中環境への適応が必要だと指摘しています。既存のドローンパーツをリサイクルするか、中古部品を購入することで、さらに支出を削減できます。
浮力制御と安定性
浮力計算
浮力の制御は機能するROVに不可欠です。アルキメデスの原理が適用されます:ビークルの重量は、移動した水の浮力と釣り合う必要があります。
浮力計算の方法:
- 各コンポーネントを個別に重量測定する
- ROVの総体積を計算する
- フロートまたは重量で調整して中性浮力を達成する
安定化システム
水中でROVを安定させるために、いくつかのアプローチが可能です:
- 受動的安定化:最適化された流体力学設計
- 能動的安定化:ジャイロスコープと加速度計の使用
- 深度制御:バラストまたは垂直推進システム
4段階の詳細な構築計画
第1段階:設計と計画
必須の予備ステップ:
- 目標と予算制約の定義
- 利用可能なコンポーネントの調査
- シャーシの3D設計
- 技術仕様の計算
完全な設計チェックリスト:
- [ ] 目標寸法と重量
- [ ] モーター構成
- [ ] 電子部品の配置
- [ ] メンテナンス用アクセスポイント
第2段階:機械的組立
防水ハルの製造:
- 構造部品の3Dプリント
- 金属部品の加工
- 防水接着剤による組立
- 窓とコネクターの取り付け
推進システム:
- ブラシレスモーターの取り付け
- プロペラの固定
- ESCコントローラーの配線
- 水上での回転テスト
第3段階:電子機器統合
電子部品の取り付け:
- コントローラー基板の取り付け
- センサーの接続
- カメラと照明の取り付け
- 電源システムの配線
必須の電気安全:
- ケーブル絶縁の確認
- 短絡テスト
- 残留湿気に対する保護
第4段階:テストと較正
推奨される段階的テスト:
- 浅いプールでの防水テスト
- 通信の確認
- 制御推進テスト
- 浮力調整
必須システムの較正:
- コマンド感度の調整
- 深度センサーの較正
- エネルギー消費の最適化
必須コンポーネント購入ガイド
基本電子機器
始めるための必須コンポーネント:
- コントローラー基板:Arduino UnoまたはRaspberry Pi Zero W
- ブラシレスモーター:多方向推進用に4-6ユニット
- ESCコントローラー:熱保護付き防水モデル
- バッテリー:防水コネクター付きLiPo 3Sまたは4S
- カメラ:統合LED照明付きHDモジュール
構造材料
予算とスキルに応じたオプション:
- PLA/ABS:3Dプリントに最適、変更が容易
- ポリカーボネート:衝撃と圧力に対する優れた耐性
- アルミニウム:最大剛性が必要な構造フレーム用
- グラスファイバー:耐久性のあるハルのプロフェッショナルソリューション
ROVプロジェクト開始の推奨事項
スキルと予算の評価
始める前に、技術スキルと利用可能な予算を正直に評価してください。オープンソースチュートリアルで提案されているようなシンプルなデザインから始め、より複雑なモデルへ進んでください。
最初のDIY ROVの標準予算:
- 基本電子機器:150-300ユーロ
- 材料と3Dプリント:50-100ユーロ
- モーターと推進:100-200ユーロ
- カメラと照明:80-150ユーロ
安全なテスト環境
弱点を特定して修正するために、プールなどの制御された環境で定期的にROVをテストしてください。論理的なステップで進めてください:
- 水面での静的テスト
- 浮力テスト
- 推進テスト
- 通信テスト
- 段階的潜水
構築に必須の工具
構築とメンテナンスを容易にするための基本工具に投資してください:
- 電子機器:マルチメーター、はんだごて、ペンチ
- 機械:六角レンチ、ドライバー、金属のこぎり
- テスト:テストプール、圧力計、ストップウォッチ
文書化とコミュニティ共有
プロジェクトを体系的に文書化し、発見をコミュニティと共有してください。この実践は集合的な知識を豊かにし、他の愛好家にインスピレーションを与える可能性があります。
ROVのメンテナンスと改善
必須の定期的メンテナンス
塩水使用後は、細心のメンテナンスが必要です:
- 真水で十分に洗い流す
- シーリングの防水性を確認する
- コネクターの腐食をチェックする
- 保管前に完全に乾燥させる
基本バージョン後の可能な進化
基本ROVが機能したら、段階的な改善を検討してください:
- 追加センサー:ソナー、水質、温度
- 自動化:自律航行、プログラムされたミッション
- パフォーマンス:より強力な推進、高容量バッテリー
水中投入前の必須テスト段階 - システムの確認
必須のツールとコミュニティリソース
共有プラットフォームとフォーラム
あなたのROVプロジェクトのための活発なコミュニティ:
- Blue Robotics Forum:詳細な経験談と技術サポート
- ArduPilot Community:ファームウェアと高度な制御に関する議論
- Reddit DIY Drones:プロジェクト共有と実践的なアドバイス
- Instructables:ステップバイステップの写真付き完全チュートリアル
設計のための無料ソフトウェア
DIY ROVのためのオープンソースツール:
- FreeCAD:完全な3Dモデリング
- OpenSCAD:高度なパラメトリック設計
- ArduSub:ROV専用ファームウェア
- QGroundControl:地上制御インターフェース
段階的な検証手順
信頼性を確保するための推奨テストシーケンス:
- 初期防水テスト
- 真水での静的な浸漬
- シールとコネクタの確認
- 時間:最低30分
- 通信テスト
- テザーケーブルの確認
- 遠隔操作のテスト
- ビデオ伝送の検証
- 推進力テスト
- 個々のモーターの制御
- 機動性のテスト
- 安定性の確認
- 浮力テスト
- 重量とフロートの調整
- 段階的な深度テスト
- 垂直安定性の検証
最適化された設計戦略
エネルギー消費の最適化
エネルギー管理はROVの自律性にとって重要です。いくつかの戦略により消費を最適化できます:
省エネルギー技術:
- 照明用の低消費電力LEDの使用
- 非アクティブシステムの自動スリープ
- 推進プロファイルの最適化
- 適切な高容量バッテリーの選択
メンテナンス容易性のための設計
適切に設計されたROVは将来の修理と改良を容易にします:
モジュラー設計要素:
- 電子部品への迅速なアクセス
- 交換を容易にする標準化コネクタ
- 独立した防水コンパートメント
- 調整可能な固定ポイント
一般的な問題のトラブルシューティングガイド
防水の問題
症状と解決策:
- ケース内の結露:シールを確認し、必要に応じて交換
- コネクタ内の水:IP68認定のマリンコネクタを使用
- ケーブル部分の漏れ:マリン用シリコンシーラントを塗布
推進力の問題
診断と解決:
- モーターが回転しない:ESCコントローラーと電源を確認
- 過度の振動:プロペラのバランス調整と固定を確認
- 出力低下:バッテリー状態と接続を確認
通信の問題
伝送システムのトラブルシューティング:
- ビデオ信号が断続的:テザーケーブルの損傷を点検
- コマンドの遅延:ケーブルの長さと品質を確認
- 完全な信号喪失:コネクタとオンボード電子機器をテスト
DIY ROVのための高度な技術
特殊センサーの統合
ROVを真の探査ツールに変えるために、高度なセンサーの追加を検討してください:
科学的探査のための推奨センサー:
- ソナー:海底マッピングと物体検出
- 温度センサー:温度変動の監視
- 塩分計:水質組成の分析
- 圧力センサー:正確な深度測定
自律航行システム
自律機能の統合はROVの有用性を大幅に向上させます:
自律航行機能:
- ウェイポイント航行:事前定義ルートのプログラミング
- 自動安定化:位置と方向の維持
- 障害物回避:自動検出と回避
- 自動帰還:問題発生時の基地への帰還
予算と財務計画
典型的なコスト配分
標準的なDIY ROVの費用詳細分析:
- 電子機器(40%):コントローラー、センサー、カメラ、ESC
- 推進力(25%):ブラシレスモーター、プロペラ、コントローラー
- 構造(20%):船体材料、コネクタ、シール
- 電源(15%):バッテリー、充電器、配線
節約戦略
品質を損なわずにコストを削減する方法:
- 既存の電子部品のリサイクル
- 専門プラットフォームでの中古部品の購入
- 非クリティカルな構造部品の3Dプリント
- コミュニティ共同購入グループへの参加
成功したDIY ROVプロジェクトの具体例
Redditの「Model C」キット
Redditユーザーがモバイルアプリ経由で制御可能なDIY水中ドローンキットを設計しました。このプロジェクトは、海を作成、実験、探査するために必要なツールを提供することを目指し、アマチュアの創造性を強調しています。
キットの技術的特徴:
- Android/iOSスマートフォンによる制御
- 45分の自律性
- 最大深度:30メートル
- 内蔵HDカメラ
Instructablesの21ステップガイド
Instructablesは、図面と実践的なアドバイスを含む水中ROV構築の詳細なガイドを提供しています。これらのリソースは、機械的組み立てから最終テストまでの各段階を視覚化できます。
ガイドでカバーされる主要ステップ:
- 防水船体の設計
- 推進システムの設置
- 電子機器の配線
- 段階的な防水テスト
Blue Roboticsコミュニティプロジェクト
Blue Roboticsコミュニティは、実際の条件下での材料、防水性、性能に関する貴重な経験談とともに、多くの成功したプロジェクトを集めています。
これらの例は、協力と共有がDIYプロジェクトの成功の核心であることを示しています。専門フォーラムに参加することで、建設者は貴重なフィードバックを得て、一般的な間違いを避けることができます。

あなたのDIY ROVに不可欠な防水コンポーネントの詳細ビュー - 保護された電子機器とマリンコネクタ
DIY ROV船体材料の比較
| 材料 | コスト | 強度 | 加工容易性 | 重量 | 推奨 |
|----------|------|------------|-------------------|-------|----------------|
| PLA(3Dプリント) | 低い | 中程度 | 非常に簡単 | 軽量 | 初心者、プロトタイプ |
| ABS(3Dプリント) | 低い | 良好 | 簡単 | 軽量 | 一般用途、淡水 |
| ポリカーボネート | 中程度 | 優れた | 中程度 | 中程度 | 海水、中深度 |
| グラスファイバー | 高い | 非常に良好 | 複雑 | 重量 | 集中使用、海水 |
| アルミニウム | 高い | 優れた | 複雑 | 重量 | プロフェッショナル、高圧 |
建設アプローチの比較
| アプローチタイプ | 推定コスト | 必要な技術レベル | 建設時間 | 最終結果 | 推奨 |
|-----------------|-------------|------------------------|----------------------|----------------|----------------|
| 組み立て済みキット | 300-600€ | 初心者 | 10-20時間 | 機能するが制限あり | 初めての経験 |
| 基本DIY | 150-400€ | 中級 | 30-50時間 | カスタマイズ可能 | 段階的な学習 |
| 高度なDIY | 400-1000€ | エキスパート | 60-100時間 | プロフェッショナル | 複雑なプロジェクト |
| 部品リサイクル | 50-200€ | 可変 | 20-60時間 | 経済的 | 予算制限 |
水中探査のための安全ガイド
環境的配慮
DIY ROVによる水中探査には責任あるアプローチが必要です:
必須の安全ルール:
- 保護区域と海洋保護区を尊重
- 水中の動植物を乱さない
- 許可なくサンプルを採取しない
- 探査に関する地域の規制を遵守
水中電気安全
水中環境での電気的リスクは現実的であり、真剣に取り組む必要があります:
不可欠な電気的予防措置:
- 認定された防水部品のみを使用
- 浸水前にすべてのケーブルの絶縁を確認
- 漏電遮断器を設置
- 使用前に防水性をテスト
結論:あなたのDIY ROV冒険はここから始まる
DIY水中ROVを構築することは、技術、探査、革新を組み合わせた充実した冒険です。検証済みのリソースと支援的なコミュニティを通じて技術的課題を克服することで、合理的なコストで機能的な車両を作成することが可能です。科学的な好奇心であれ、工作の楽しみであれ、このプロジェクトは私たちの海に対するより深い理解への扉を開きます。
では、未知の世界に飛び込んでみませんか?適切なツールと協力的な精神を持てば、あなたは次の深海探検家になるかもしれません。
さらに学ぶために
- Medium - DIY海洋調査船構築に関する記事
- Discuss Bluerobotics - 「ジュール・ヴェルヌ」プロジェクトとロシアROV作成に関する議論
- Discuss Bluerobotics - 3DプリントROV構築の経験談
- Spectrum Ieee - 独自の水中ロボット構築ガイド
- Discuss Ardupilot - 個人ROVプロジェクトに関する議論
- Cpsdrone - DIY水中ドローン構築に関する記事
- Instructables - 水中ROV製作の詳細チュートリアル
- Reddit - DIY水中ドローンキットの紹介