ROV DIY: Construir un vehículo submarino a control remoto asequible
La exploración submarina, antes reservada a científicos y profesionales con presupuestos considerables, se está volviendo accesible gracias a los avances tecnológicos. La construcción de vehículos submarinos a control remoto (ROV) a bajo costo ahora abre las puertas de las profundidades oceánicas a los entusiastas. Según un artículo de Medium, una parte significativa del presupuesto federal de exploración oceánica (estimado entre 20 y 30 millones de dólares) se dedica a herramientas y barcos de sondeo de las profundidades, destacando el potencial de las iniciativas DIY para democratizar esta exploración.
Para los entusiastas de la tecnología y los aficionados al bricolaje, construir su propio ROV representa una oportunidad única de descubrir un mundo poco conocido sin inversiones astronómicas. Esta guía detallada te acompaña a través de cada etapa, basándose en fuentes verificadas y los comentarios de la comunidad. Abordaremos los desafíos técnicos, las soluciones económicas y cómo aprovechar los proyectos de código abierto para tener éxito en tu aventura submarina.
> Perspectiva clave: La construcción de un ROV DIY no es solo un proyecto técnico; es una puerta de entrada a la oceanografía ciudadana, permitiendo que cada uno contribuya al conocimiento de los ecosistemas marinos.

ROV DIY en acción durante una exploración submarina - demostrando la viabilidad de los proyectos DIY
¿Por qué construir un ROV submarino DIY?
Los vehículos submarinos a control remoto permiten explorar entornos acuáticos sin los riesgos y costos asociados al buceo humano. Ya sea para inspeccionar naufragios, estudiar la vida marina o satisfacer una curiosidad personal, estos dispositivos ofrecen una flexibilidad incomparable. IEEE Spectrum destaca que poseer tu propio ROV permite descubrir los fondos marinos sin mojarse, ampliando así las posibilidades para aficionados y educadores.
Ventajas principales de un ROV DIY:
- Accesibilidad financiera: Costo reducido en comparación con las soluciones comerciales
- Personalización total: Adaptación a necesidades específicas
- Aprendizaje técnico: Desarrollo de habilidades en electrónica y mecánica
- Comunidad activa: Intercambio de conocimientos y soporte técnico
Sin embargo, los ROV comerciales pueden costar miles de euros, haciéndolos inaccesibles para muchos. Los enfoques DIY cambian las reglas del juego: al usar componentes estándar y diseños de código abierto, es posible reducir considerablemente los costos. El proyecto OpenROV, mencionado en las discusiones de ArduPilot, propone por ejemplo kits para construir tu propio ROV, fomentando una comunidad activa de intercambio de conocimientos.
Desafíos técnicos principales y soluciones prácticas
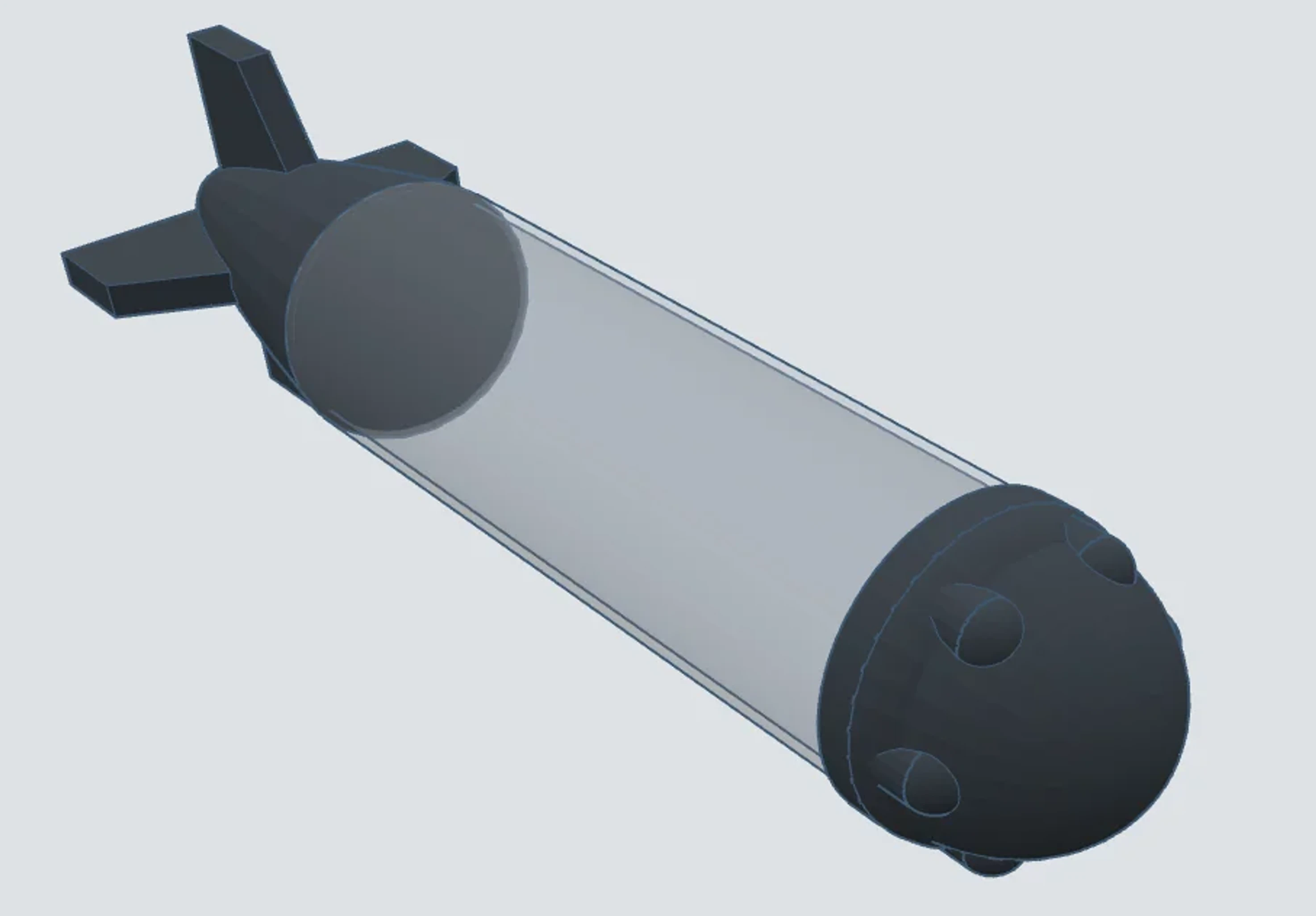
Estanqueidad y resistencia a la presión
La estanqueidad representa el desafío principal en la construcción de un ROV DIY. Los componentes electrónicos deben resistir la presión y la humedad. En el foro Blue Robotics, un usuario comparte su experiencia con un ROV impreso en 3D, destacando la importancia de la elección de materiales y las pruebas rigurosas.
Soluciones prácticas para la estanqueidad:
- Usa carcasas estancas certificadas IP68
- Privilegia cables especiales resistentes al agua
- Realiza pruebas en aguas poco profundas antes de cualquier inmersión profunda
- Aplica juntas de silicona marina en todas las interfaces
Sistema de propulsión submarina
Los motores brushless comúnmente utilizados en drones aéreos pueden adaptarse, pero requieren controladores resistentes al agua. Un participante en Blue Robotics señaló haber quemado un relé estático (SSR) barato, optando luego por una unidad más confiable.
Configuración recomendada para la propulsión:
- Motores brushless con carcasas estancas
- Controladores ESC impermeables
- Hélices optimizadas para la propulsión acuática
Control remoto y transmisión
La transmisión de señales a través de un cable umbilical es crucial para el funcionamiento del ROV. La calidad del cable impacta directamente en la confiabilidad de la conexión.
Puntos clave para la transmisión:
- Elige un cable umbilical suficientemente largo (mínimo 50m)
- Opta por un cable robusto con protección antienganches
- Verifica la compatibilidad de los conectores estancos
Estos desafíos técnicos no son insuperables. Con una planificación minuciosa y el acceso a los recursos comunitarios, incluso los principiantes pueden progresar. El proyecto "Jules Verne" documentado en Blue Robotics muestra cómo un aficionado ruso usó una máquina CNC personalizada y un torno chino modificado para fabricar piezas precisas, demostrando la importancia del equipamiento adaptado.
Enfoques económicos para tu ROV DIY
Materiales y fabricación
El uso de impresoras 3D, como describe un usuario de Blue Robotics, permite crear carcasas y soportes personalizados a precios asequibles.
Elección de materiales para tu ROV DIY:
- PLA o ABS para la impresión 3D (buena relación resistencia/precio)
- Policarbonato para piezas críticas que requieren mejor durabilidad
- Fibra de vidrio para carcasas que necesitan resistencia aumentada
Electrónica y control
Los componentes electrónicos comunes pueden integrarse para gestionar la lógica de vuelo y la comunicación.
Configuración electrónica recomendada:
- Controladores Arduino o Raspberry Pi para el procesamiento
- Relés estáticos (SSR) de calidad superior para evitar fallos
- Sensores de presión y temperatura para el monitoreo
- Cámara submarina con iluminación LED integrada
Software y programación
Plataformas como ArduPilot proponen firmwares de código abierto para el control de ROV, facilitando la programación y los ajustes.
Opciones de software para tu proyecto ROV:
- Firmware ArduSub para control avanzado
- Interfaces de pilotaje personalizables
- Registros de datos para el análisis de rendimiento
CPS Drone destaca que construir un dron submarino sigue principios similares a los de los drones aéreos, pero con adaptaciones para el entorno acuático. Al reciclar piezas de drones existentes o comprar componentes de segunda mano, es posible reducir aún más los gastos.
Control de flotabilidad y estabilidad
Cálculo de la flotabilidad
El dominio de la flotabilidad es esencial para un ROV funcional. Se aplica el principio de Arquímedes: el peso del vehículo debe equilibrarse con el empuje del agua desplazada.
Método de cálculo para la flotabilidad:
- Pesa cada componente individualmente
- Calcula el volumen total del ROV
- Ajusta con flotadores o peso para alcanzar la flotabilidad neutra
Sistemas de estabilización
Para mantener el ROV estable en el agua, son posibles varios enfoques:
- Estabilización pasiva: diseño hidrodinámico optimizado
- Estabilización activa: uso de giroscopios y acelerómetros
- Control de profundidad: lastres o sistemas de propulsión vertical
Plan de construcción en 4 fases detalladas
Fase 1: Diseño y planificación
Pasos preliminares esenciales:
- Definición de objetivos y restricciones presupuestarias
- Investigación de componentes disponibles
- Diseño 3D del chasis
- Cálculo de especificaciones técnicas
Lista de verificación de diseño completa:
- [ ] Dimensiones y peso objetivo
- [ ] Configuración de motores
- [ ] Ubicación de componentes electrónicos
- [ ] Puntos de acceso para mantenimiento
Fase 2: Ensamblaje mecánico
Fabricación de la carcasa estanca:
- Impresión 3D de piezas estructurales
- Mecanizado de componentes metálicos
- Ensamblaje con adhesivo estanco
- Instalación de portillos y conectores
Sistema de propulsión:
- Montaje de motores brushless
- Fijación de hélices
- Cableado de controladores ESC
- Pruebas de rotación fuera del agua
Fase 3: Integración electrónica
Instalación de componentes electrónicos:
- Montaje de la placa controladora
- Conexión de sensores
- Instalación de cámara e iluminación
- Cableado del sistema de alimentación
Seguridad eléctrica indispensable:
- Verificación del aislamiento de cables
- Pruebas de cortocircuito
- Protección contra humedad residual
Fase 4: Pruebas y calibración
Pruebas progresivas recomendadas:
- Prueba de estanqueidad en estanque poco profundo
- Verificación de comunicaciones
- Prueba de propulsión controlada
- Ajuste de flotabilidad
Calibración de sistemas esenciales:
- Ajuste de sensibilidad de controles
- Calibración de sensores de profundidad
- Optimización del consumo energético
Guía de compra de componentes esenciales
Electrónica básica
Componentes indispensables para comenzar:
- Placa controladora: Arduino Uno o Raspberry Pi Zero W
- Motores brushless: 4-6 unidades para propulsión multidireccional
- Controladores ESC: Modelos impermeables con protección térmica
- Baterías: LiPo 3S o 4S con conectores estancos
- Cámara: Módulo HD con iluminación LED integrada
Materiales estructurales
Opciones según tu presupuesto y habilidades:
- PLA/ABS: Ideal para impresión 3D, fácil de modificar
- Policarbonato: Excelente resistencia a impactos y presión
- Aluminio: Para marcos estructurales que requieren rigidez máxima
- Fibra de vidrio: Solución profesional para carcasas duraderas
Recomendaciones para comenzar tu proyecto ROV
Evaluación de habilidades y presupuesto
Antes de lanzarte, evalúa honestamente tus habilidades técnicas y tu presupuesto disponible. Comienza con un diseño simple, como los propuestos en los tutoriales de código abierto, y progresa hacia modelos más complejos.
Presupuesto típico para un primer ROV DIY:
- Electrónica básica: 150-300€
- Materiales e impresión 3D: 50-100€
- Motores y propulsión: 100-200€
- Cámara e iluminación: 80-150€
Entorno de prueba seguro
Prueba regularmente tu ROV en un entorno controlado, como una piscina, para identificar y corregir debilidades. Procede por pasos lógicos:
- Prueba estática en superficie
- Prueba de flotabilidad
- Prueba de propulsión
- Prueba de comunicación
- Inmersión progresiva
Herramientas esenciales para la construcción
Invierte en herramientas básicas para facilitar la construcción y el mantenimiento:
- Electrónica: Multímetro, soldador, pinzas
- Mecánica: Llaves Allen, destornilladores, sierra para metales
- Prueba: Estanque de ensayo, manómetro, cronómetro
Documentación e intercambio comunitario
Documenta sistemáticamente tu proyecto y comparte tus descubrimientos con la comunidad. Esta práctica enriquece los conocimientos colectivos y puede inspirar a otros entusiastas.
Mantenimiento y mejoras de tu ROV
Mantenimiento regular indispensable
Después de cada uso en agua salada, es necesario un mantenimiento minucioso:
- Enjuagar abundantemente con agua dulce
- Verificar la estanqueidad de juntas
- Controlar la corrosión de conectores
- Secar completamente antes del almacenamiento
Evoluciones posibles después de la versión básica
Una vez que el ROV básico sea funcional, considera mejoras progresivas:
- Sensores adicionales: Sonar, calidad del agua, temperatura
- Automatización: Navegación autónoma, misiones programadas
- Rendimiento: Propulsión más potente, baterías de alta capacidad
Fase de prueba esencial en un entorno controlado antes de la puesta en agua - verificación de sistemas
Herramientas y recursos comunitarios indispensables
Plataformas de intercambio y foros
Comunidades activas para tu proyecto ROV:
- Blue Robotics Forum: Retroalimentación detallada de experiencias y soporte técnico
- ArduPilot Community: Discusiones sobre firmwares y control avanzado
- Reddit DIY Drones: Intercambio de proyectos y consejos prácticos
- Instructables: Tutoriales completos con fotos paso a paso
Software gratuito para diseño
Herramientas de código abierto para tu ROV DIY:
- FreeCAD: Modelado 3D completo
- OpenSCAD: Diseño paramétrico avanzado
- ArduSub: Firmware especializado para ROV
- QGroundControl: Interfaz de control terrestre
Pasos de validación progresiva
Secuencia de pruebas recomendada para garantizar la fiabilidad:
- Prueba de estanqueidad inicial
- Inmersión estática en agua dulce
- Verificación de juntas y conectores
- Duración: 30 minutos mínimo
- Prueba de comunicación
- Verificación del cable umbilical
- Prueba de comandos a distancia
- Validación de la transmisión de video
- Prueba de propulsión
- Control de motores individuales
- Prueba de maniobrabilidad
- Verificación de la estabilidad
- Prueba de flotabilidad
- Ajuste del peso y flotadores
- Prueba de profundidad progresiva
- Validación de la estabilidad vertical
Estrategias de diseño optimizadas
Optimización del consumo energético
La gestión de energía es crucial para la autonomía de tu ROV. Varias estrategias permiten optimizar el consumo:
Técnicas de ahorro de energía:
- Uso de LED de bajo consumo para iluminación
- Puesta en reposo automática de sistemas inactivos
- Optimización de perfiles de propulsión
- Elección de baterías de alta capacidad adecuadas
Diseño para mantenimiento fácil
Un ROV bien diseñado facilita las reparaciones y mejoras futuras:
Elementos de diseño modular:
- Acceso rápido a componentes electrónicos
- Conectores estandarizados para facilitar reemplazos
- Compartimentos estancos independientes
- Puntos de fijación modulables
Guía de solución de problemas comunes
Problemas de estanqueidad
Síntomas y soluciones:
- Condensación en la carcasa: Verifique las juntas y reemplácelas si es necesario
- Agua en los conectores: Use conectores marinos certificados IP68
- Fuga a nivel de cables: Aplique masilla de silicona marina
Problemas de propulsión
Diagnóstico y resolución:
- Motores no giran: Verifique los controladores ESC y la alimentación
- Vibraciones excesivas: Equilibre las hélices y verifique las fijaciones
- Pérdida de potencia: Controle el estado de las baterías y las conexiones
Problemas de comunicación
Solución de problemas de sistemas de transmisión:
- Señal de video intermitente: Inspeccione el cable umbilical en busca de daños
- Latencia de comandos: Verifique la longitud y calidad del cable
- Pérdida total de señal: Pruebe los conectores y la electrónica de a bordo
Técnicas avanzadas para ROV DIY
Integración de sensores especializados
Para transformar tu ROV en una verdadera herramienta de exploración, considera agregar sensores avanzados:
Sensores recomendados para exploración científica:
- Sonar: Cartografía de fondos marinos y detección de objetos
- Sensores de temperatura: Monitoreo de variaciones térmicas
- Sondas de salinidad: Análisis de la composición del agua
- Sensores de presión: Medición precisa de la profundidad
Sistemas de navegación autónoma
La integración de capacidades autónomas puede aumentar considerablemente la utilidad de tu ROV:
Funcionalidades de navegación autónoma:
- Navegación por waypoints: Programación de rutas predefinidas
- Estabilización automática: Mantenimiento de posición y orientación
- Evitación de obstáculos: Detección y desvío automáticos
- Retorno automático: Regreso a la base en caso de problema
Presupuesto y planificación financiera
Distribución de costos típicos
Análisis detallado de gastos para un ROV DIY estándar:
- Electrónica (40%): Controladores, sensores, cámara, ESC
- Propulsión (25%): Motores brushless, hélices, controladores
- Estructura (20%): Materiales de casco, conectores, juntas
- Alimentación (15%): Baterías, cargador, cableado
Estrategias de ahorro
Métodos para reducir costos sin comprometer la calidad:
- Reciclaje de componentes electrónicos existentes
- Compra de piezas usadas en plataformas especializadas
- Impresión 3D de piezas estructurales no críticas
- Participación en grupos de compra comunitarios
Ejemplos concretos de proyectos ROV DIY exitosos
Kit "Model C" en Reddit
Un usuario de Reddit diseñó un kit de dron submarino DIY controlable mediante aplicación móvil. Este proyecto busca proporcionar las herramientas necesarias para crear, experimentar y explorar el océano, destacando la creatividad de los aficionados.
Características técnicas del kit:
- Control mediante smartphone Android/iOS
- Autonomía de 45 minutos
- Profundidad máxima: 30 metros
- Cámara HD integrada
Guía Instructables en 21 pasos
Instructables ofrece una guía detallada para construir un ROV submarino, incluyendo esquemas y consejos prácticos. Estos recursos permiten visualizar cada fase, desde el ensamblaje mecánico hasta las pruebas finales.
Pasos clave cubiertos en la guía:
- Diseño del casco estanco
- Instalación del sistema de propulsión
- Cableado de la electrónica
- Pruebas de estanqueidad progresivas
Proyecto comunitario Blue Robotics
La comunidad Blue Robotics agrupa numerosos proyectos exitosos, con retroalimentación valiosa sobre materiales, estanqueidad y rendimiento en condiciones reales.
Estos ejemplos demuestran que la colaboración y el intercambio están en el corazón del éxito de los proyectos DIY. Al participar en foros especializados, los constructores se benefician de retroalimentación valiosa y evitan errores comunes.

Vista detallada de los componentes estancos esenciales para tu ROV DIY - electrónica protegida y conectores marinos
Comparación de materiales para cascos ROV DIY
| Material | Costo | Resistencia | Facilidad de mecanizado | Peso | Recomendación |
|----------|------|------------|-------------------|-------|----------------|
| PLA (impresión 3D) | Bajo | Media | Muy fácil | Ligero | Principiantes, prototipos |
| ABS (impresión 3D) | Bajo | Buena | Fácil | Ligero | Uso general, agua dulce |
| Policarbonato | Moderado | Excelente | Moderada | Medio | Agua salada, profundidad media |
| Fibra de vidrio | Alto | Muy buena | Compleja | Pesado | Uso intensivo, agua salada |
| Aluminio | Alto | Excelente | Compleja | Pesado | Profesional, alta presión |
Comparación de enfoques de construcción
| Tipo de enfoque | Costo estimado | Nivel técnico requerido | Tiempo de construcción | Resultado final | Recomendación |
|-----------------|-------------|------------------------|----------------------|----------------|----------------|
| Kit listo para armar | 300-600€ | Principiante | 10-20 horas | Funcional pero limitado | Primera experiencia |
| DIY básico | 150-400€ | Intermedio | 30-50 horas | Personalizable | Aprendizaje progresivo |
| DIY avanzado | 400-1000€ | Experto | 60-100 horas | Profesional | Proyectos complejos |
| Reciclaje componentes | 50-200€ | Variable | 20-60 horas | Económico | Presupuesto limitado |
Guía de seguridad para exploración submarina
Consideraciones ambientales
La exploración submarina con un ROV DIY requiere un enfoque responsable:
Reglas de seguridad esenciales:
- Respete las zonas protegidas y las reservas marinas
- Evite perturbar la fauna y flora submarina
- No tome muestras sin autorización
- Respete las regulaciones locales sobre exploración
Seguridad eléctrica submarina
Los riesgos eléctricos en medio acuático son reales y deben tomarse en serio:
Precauciones eléctricas indispensables:
- Use únicamente componentes estancos certificados
- Verifique el aislamiento de todos los cables antes de la inmersión
- Instale disyuntores diferenciales
- Pruebe la estanqueidad antes de cada uso
Conclusión: Tu aventura ROV DIY comienza aquí
Construir un ROV submarino DIY es una aventura enriquecedora que combina tecnología, exploración e innovación. Al superar los desafíos técnicos gracias a recursos verificados y una comunidad solidaria, es posible crear un vehículo funcional a un costo razonable. Ya sea que estés motivado por la curiosidad científica o el placer de la construcción, este proyecto abre la puerta a una comprensión más profunda de nuestros océanos.
Entonces, ¿por qué no sumergirse en lo desconocido? Con las herramientas adecuadas y un espíritu colaborativo, podrías convertirte en el próximo explorador de las profundidades.
Para profundizar
- Medium - Artículo sobre la construcción de un buque de investigación oceánica DIY
- Discuss Bluerobotics - Discusión sobre el proyecto "Julio Verne" y la creación de un ROV ruso
- Discuss Bluerobotics - Retroalimentación de experiencia sobre la construcción de un ROV impreso en 3D
- Spectrum Ieee - Guía para construir tu propio robot submarino
- Discuss Ardupilot - Discusión sobre proyectos ROV personales
- Cpsdrone - Artículo sobre la construcción de drones submarinos DIY
- Instructables - Tutorial detallado para fabricar un ROV submarino
- Reddit - Presentación de un kit de dron submarino DIY